

RaspberryPi 4BとHQカメラを合体させるためのケースを試作しています。
用途は、顕微鏡用カメラ、天体望遠鏡用カメラ、IoT AI用カメラなどを想定しています。
電源スイッチはGPIO経由でのシャットダウン通知が可能です。
HQカメラの特殊機能について
RaspberryPiフォーラムの下記スレッドのようにHQカメラは同期信号とストロボ信号をサポートしています。
https://www.raspberrypi.org/forums/viewtopic.php?f=43&t=281913
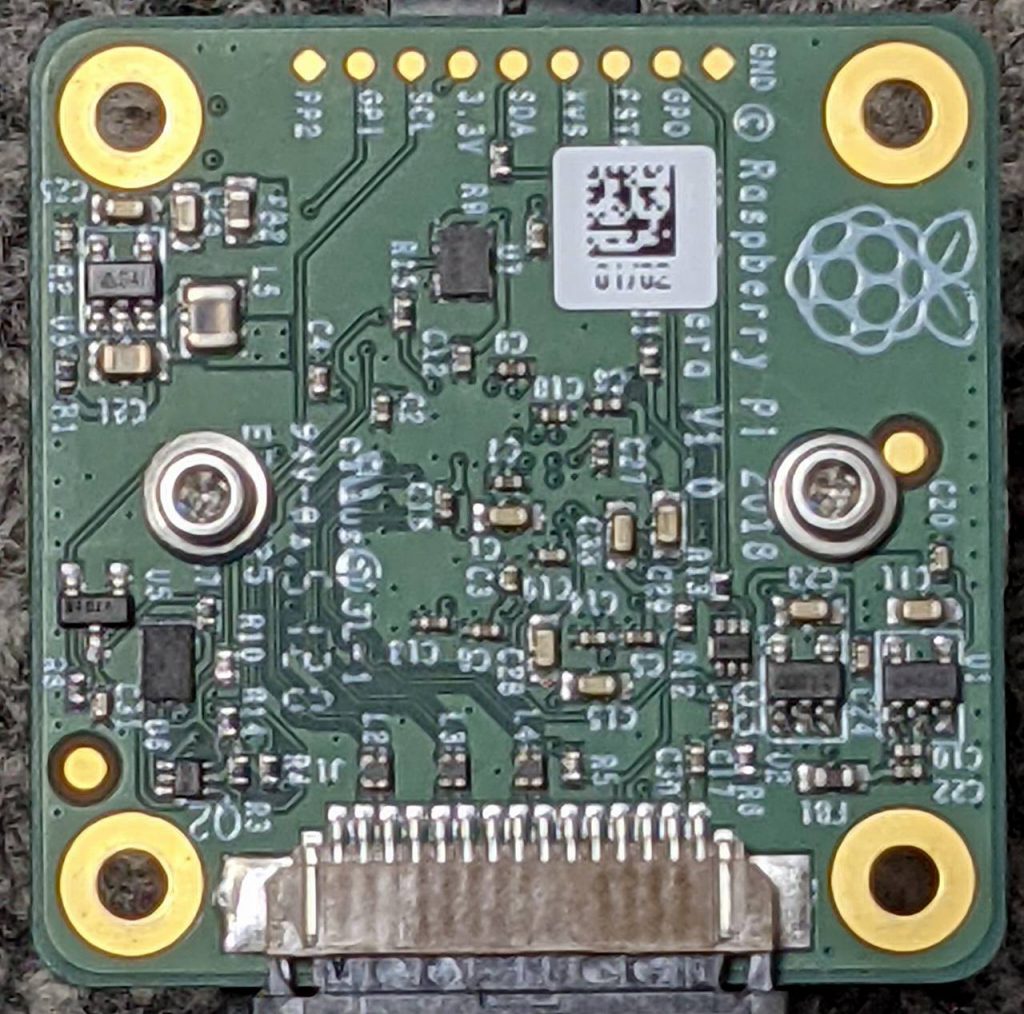
HQカメラ背面の端子は、右から以下の通りです。
| 端子 | 信号 |
|---|---|
| GND | GND |
| GP0 | HSYNC(水平同期) |
| FSTROBE | STROBE |
| XVS | VSYNC(垂直同期) |
今回試作のケースではVSYNCとストロボ用のコネクタを用意しています。
HQカメラの同期信号を有効化
/boot/config.txtに以下の記述を追加することでHQカメラの同期信号を有効にすることができます。
#—————————< o >———————————-
# HQ camera sync signal settings
imx477_hv_sync_enable=1
imx477_hsync_polarity=1
imx477_vsync_polarity=1
# Pulse width, proportional to the pixel clock frequency.
# Valid values are 0 (smallest width) to 7 (largest width)
imx477_hsync_width=6
imx477_vsync_width=7
#—————————< o >———————————-
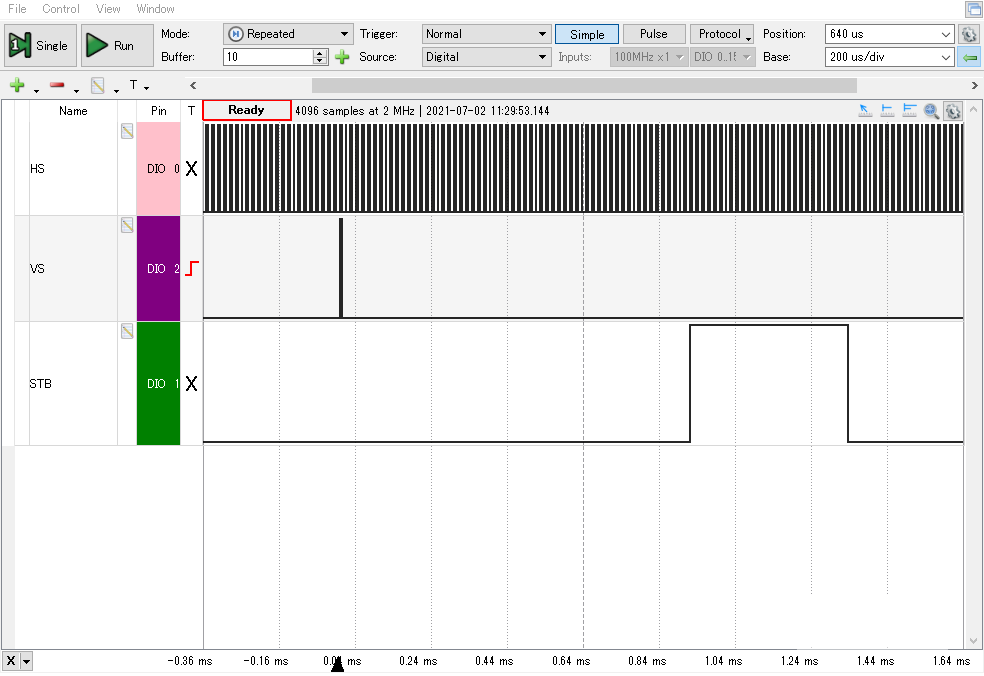
HQカメラを起動すると、各端子にこのような波形が観測されます。
(この波形は、STROBE信号も出力設定したものです)
使用方法
注意:これらの機能は確認が完了しているものではありませんので、参考情報です。
VSYNC
VSYNCは、出力と入力の設定が可能です。
1台のカメラをマスターとして出力に設定し、他のカメラをスレーブとして入力に設定することで、同期動作が可能になります。
/boot/config.txtに以下の行を追加します。マスターは’1’、スレーブは’2’です。
#—————————< o >———————————-
# VSYNC direction 1:output, 2:input
imx477_trigger_mode=1
#—————————< o >———————————-
試作ケースでは、RJ-11コネクタを使ってRS458レベルで入出力します。
STROBE
STROBE信号は/boot/config.txtに以下の記述で有効にできます。
#—————————< o >———————————-
# HQ camera strobe signal settings
imx477_fstrobe_enable=1
# Set to 0 for single strobe pulse, or 1 for continuous pulses every frame.
imx477_fstrobe_cont_trig=1
# Number of lines to delay before triggering the pulse.
# Set this to the frame height if you want all lines to be exposing for the flash strobe.
imx477_fstrobe_delay=5
# Set to 1 to only trigger the pulse in stills capture mode.
imx477_fstrobe_stills_only=0
# Width of the pulse, in units of the INCLK period.
imx477_fstrobe_width=10000
#—————————< o >———————————-
試作ケースではΦ3.5mmジャックを使ってオープンドレイン信号で出力しています。
※信号極性、パルス幅など各パラメータは使用状況により調整が必要です。
※試作品のため、今後仕様変更の可能性があります。
※このケースに興味がございましたら下記あてご連絡ください。
Mail: info@jp.terratechnos.com